
The 7 Robots That Shaped The Industry, And The Engineers Who Created Them
Not only did Unimate bring robotics to their first home on automotive production lines, but its creator Joseph Engelberger is widely considered the father of the robotics industry itself. From 1956 to 1959, Engelberger and American inventor George Devol, worked on their first prototype of an automated Programmed Article Transfer device (a patent that Engelberger already had pending by the time he met Devol). The result, Unimate #0001, is generally recognised as the first industrial robot. The arm went on to revolutionise the manufacturing industry after its first adoption by General Motors.
The Stanford Arm — Victor Scheinman
The Stanford Arm would build on Unimate’s foundations and further evolve the automobile assembly line. The first computer-controlled, electronically powered robotic arm, The Stanford Arm championed versatility in the industrial robotics sector. Its multi-programmable functions and six degrees of freedom allowed it to integrate quickly into the assembly line and branch further out into other tasks.
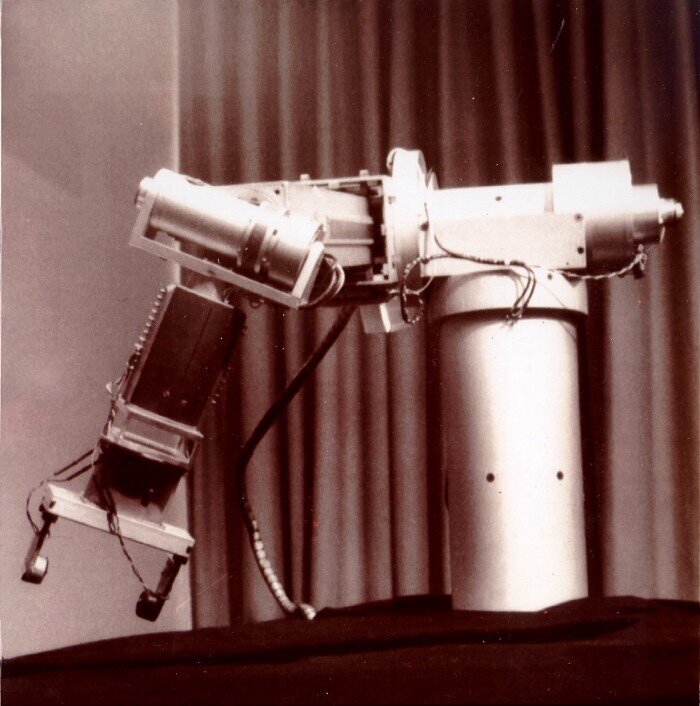
The Stanford Arm was created by Victor Scheinman, who later founded Vicarm, Inc. in 1973 in order to further develop his invention. After the sale of his company to Unimation, he would work alongside Unimate developers to create the Programmable Universal Machine for Assembly (PUMA).
WABOT-1 — Ichiro Kato
In 1972, the world’s first full-scale android came to fruition. The result of 5 years of work from Ichiro Kato, the WABOT-1 was able to walk with its legs, grip with its arms, and ‘see’ using two cameras. The premise was born from the robot’s presence on the automated production line and developed in accordance with the idea that as robots will be doing the work of the human, they should process information and act upon that information in the same way. The humanoid result was able to communicate with a human in Japanese as well as assess distances and directions of objects in its field of view while it worked.